2.研究開発の状況
以下では、現在消防庁において取り組んでいるAIやロボット等を利用したシステム等に関する研究開発の事例について紹介する。
(1)消防ロボットシステム(スクラムフォース)の配備
ア 目的及び概要
今後発生が懸念されている南海トラフ地震及び首都直下地震の被害想定地域には、我が国有数のエネルギー・産業基盤が集積し、石油コンビナートにおける大規模・特殊な災害が発生した際には、消防隊が現場に近づけない等の大きな課題がある。そこで耐熱性が高く、災害状況の画像伝送や放水等の消防活動を行うAI技術を活用した消防ロボットシステムの研究開発を平成26年度から進めている。
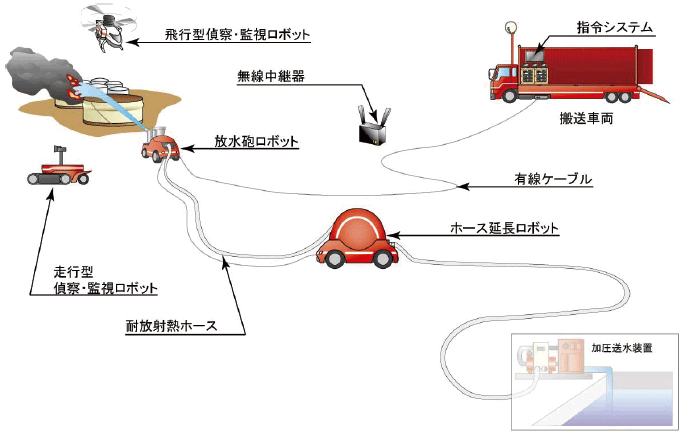
消防ロボットシステムは、消防隊員による操縦の必要がなく、システムが複数提案する移動経路や放水する位置の判断及び指示を入力するだけで、半自律的*1に爆発抑制や火災の延焼防止のための冷却活動や消火活動を行うことができる。消防ロボットシステムの活動イメージを特集4-1図に示す。消防隊員が災害現場から十分離れた安全な領域から指示を入力し、消防ロボットシステムが機能する。
具体的には、空中や地上から偵察・監視するロボットの情報を基に、放水砲ロボットの最適な放水位置を導出し、放水砲ロボット及びホース延長ロボットがそれぞれの活動を行う。消防ロボットシステムによる消防活動を効率的に実施するために、以下のような高度な技術を活用している。
特集4-1図 消防ロボットシステムの活動イメージ
画像をクリック(タップ)すると拡大表示します
(ア)大規模火災に対する有効な消防活動を実施するために、AI技術を活用し、複数のロボットに機能を分散させ、情報を共有し、協調連携して活動させる技術
(イ)消防隊員からより離れた場所で半自律的に活動するために、AI技術を活用し、過酷な状況においても画像認識や空間認識などを機能させる先端技術
(ウ)大規模火災に近接した高熱な領域において消防活動を行うための耐熱技術
大規模災害に対応するために複数のロボットが協調連携して活動するが、一方でシステムの一部のロボット、例えば偵察・監視ロボットだけでも機能することも考慮し、研究開発を進めてきた。
本研究開発では、各単体のロボットの試作機を完成させ、試作したロボットに協調連携や自律化といった高度な機能を取り込み、平成30年度に実戦配備可能な消防ロボットシステムを完成させた。
イ 実戦配備型の完成
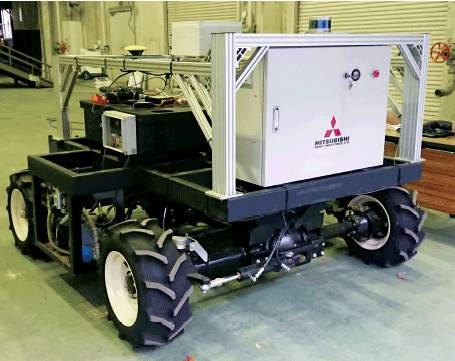
飛行型偵察・監視ロボットは、プロペラが上下に2つ重なり、逆向き方向に回転する「二重反転機構」を採用している。この機構により、テールローター*2を要さず小型化が可能になり、また、プロペラが吹き下ろす気流は、ロボット本体の冷却にも効果的に利用できる。走行型偵察・監視ロボットは飛散物が散乱した状況での走行も想定し、車輪、クローラー(履帯)*3の2つの走行機構を備えている。クローラーは、悪路や障害物に対する走破性能は高いが移動速度が遅く、自律走行精度が低い。そこで、障害物等が検出されない範囲では、移動速度が早く、自律走行精度が高い車輪で走行する。放水砲ロボット及びホース延長ロボットは、サスペンション機構を備えた4輪駆動であり、農業用機械を応用し、地盤の液状化が発生した場所等においても走行が可能である。
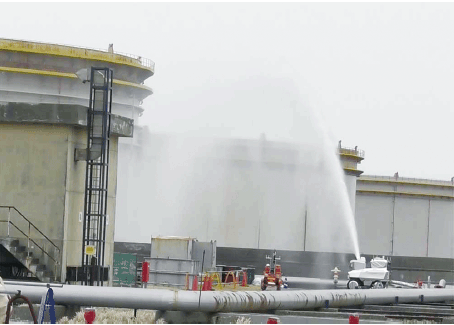
放水砲ロボットに装備されているノズルは新たに開発したもので、広角噴霧放水、ストレート放水、泡放射をノズルの形状切り替えだけで実現している。泡放射は、放水軌跡の安定性及び泡による消火性能を両立できる方式を採用している。消防隊が所有する最大級のポンプで送水可能な放水量4,000L/min、放水圧1.0MPaに対応したノズルである。
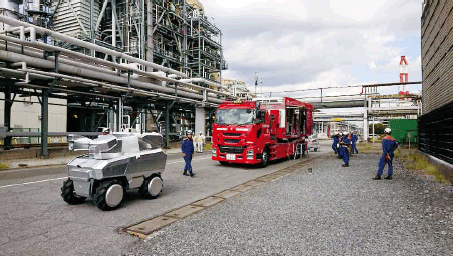
各ロボットは半自律的に動作するが、最終的な判断は消防隊員が指示する。指示を各ロボットへ統合的に伝達する指令システムが搬送車両に設置されている。なお、消防ロボットシステムは1台の車両に収納し現場へ搬送する。

ウ 部隊発足と実証配備の開始
平成30年度末に完成した消防ロボットシステムを市原市消防局に緊急消防援助隊車両として配備した。市原市は、習熟期間を経て、令和元年5月24日に当該ロボットシステムを装備した特殊装備小隊を発足させた。この部隊発足式に合わせ、消防ロボットシステムをスクラムフォース、飛行型偵察・監視ロボットをスカイ・アイ、走行型偵察・監視ロボットをランド・アイ、放水砲ロボットをウォーター・キャノン、ホース延長ロボットをタフ・リーラーと命名し、スクラムフォースのロゴ・マークを発表した。


エ 災害対応のためのより優れたシステムへ
消防ロボットシステムが緊急消防援助隊として全国の石油コンビナート災害に対応するためには、遠隔操縦モードに加えて、各ロボットが自律的に走行できるようにすることが重要であり、そのためには石油コンビナートの電子化された地図が必要になる。平成30年度から首都直下地震を想定し、東京湾岸の大規模石油コンビナートでのデータ蓄積を進めている。
実証配備では、より消防隊が使いやすく、適切な機能が備わった消防ロボットシステムとするために、スイッチやアンテナの位置の変更等最適化を進めている。また、最新技術の評価も併せて実施し、準天頂衛星「みちびき」技術の導入を進めている。令和2年度末に、量産型の仕様を取りまとめる計画である。
(2)迅速な救急搬送を目指した救急隊運用最適化の研究開発
ア 研究概要
救急自動車による現場到着所要時間は全国平均で8.7分(令和元年)、病院収容所要時間は全国平均で39.5分(令和元年)となり、救急出動件数の増加とともに救急活動時間は延伸傾向にある(第2-5-4図参照)。
この課題に対して消防庁としてこれまで♯7119等様々な対策を行っているが、新しい取組としてAIを活用して救急隊の効率的な運用を行うことにより、現場到着所要時間を短縮する手法の研究開発を行っている。
この手法は、消防本部で既に所有しているこれまでの救急活動データ(発生日時、発生曜日、発生場所、年齢、性別、傷病名、対応救急隊名等)と気象予報(気温、天気)の関係性を分析した結果を用いて救急需要が多く見込まれる地域をリアルタイムにメッシュで予測し、当該地域に事前に救急隊を移動配置させることにより効率化を図り、現場到着所要時間を短縮することを目指している。
これまでに名古屋市消防局の協力により過去9年間の救急活動データ(約100万件分)と気象予報を分析して救急需要を予測するプログラムのプロトタイプを研究開発した(特集4-2図)。
特集4-2図 救急需要のメッシュ予測
画像をクリック(タップ)すると拡大表示します
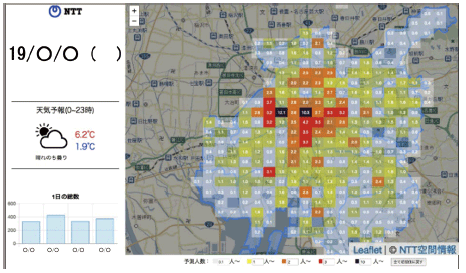
色の濃いメッシュ(紺色が最大)は救急需要が多いと予測した地域
本手法により救急自動車の現場到着所要時間の短縮が見込まれたとしても、実際の救急隊で運用が可能であることが必要である。そこで、実際に運用が可能な方法を検討するために、移動先の救急車の待機場所確保(特集4-3図)、救急隊員の食事時間や休憩場所の確保、他業務との調整を考慮し移動可能な救急隊を選定した実証実験(令和2年2月17日~28日)を行った。その結果、名古屋市消防局全体の平均現場到着所要時間が短縮され、また実証実験に参加した救急隊員からは「この手法なら十分対応可能」との意見が得られたこと等を踏まえれば、本手法について現場到着所要時間の短縮効果が期待できるとともに実際に運用が可能なことが明らかになった。
救急車は車室内の温度上昇を抑えるため屋内で待機させるのが原則だが、移動先の出張所には屋内の駐車スペースが空いていないため、消防車を屋外の駐車場に移動。
特集4-3図 移動配置先で待機中の救急車

イ 今後の研究方針
今後、救急隊数や移動時間間隔などの条件を変えて実証実験を行い、令和2年度末の運用最適化手法の完成を目指して研究を進めている。
(3)ドローンによる画像の解析結果の消防防災活動への活用
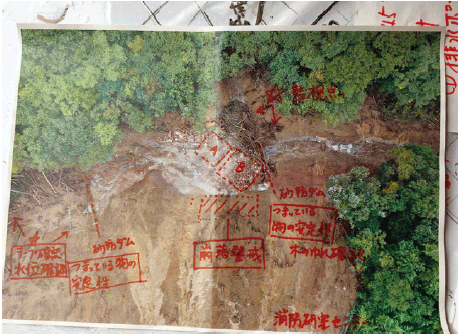
災害発生時に消防防災活動に従事する消防職団員は、二次災害に巻き込まれるリスクの高い現場で活動することが求められる場合があり、当該活動現場における安全管理に細心の注意を払うことが必要である。このような観点から消防研究センターでは、令和元年東日本台風(台風第19号)によって発生した神奈川県相模原市緑区牧野における土砂災害現場の安全管理に関する技術支援を行うため2人の研究官を派遣した。当該現場(特集4-4図)においては、現地踏査を行うとともに、危険箇所を把握した上で、計測装置を用いた監視、ドローンによる湧水の確認、ドローン画像を用いた地図の作成、降雨時の消防活動中止基準の提案や再開時の安全確認を行った。
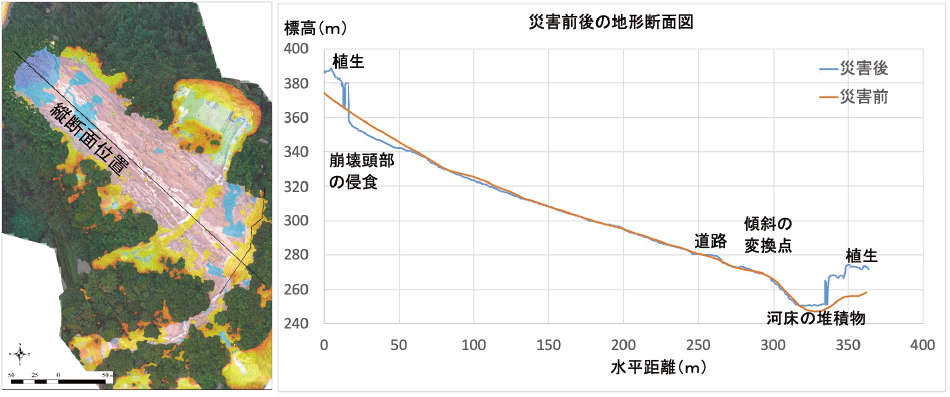
ドローンの画像は、全体状況の把握、重点的に監視する範囲の指定及び監視員の配置の指定に活用した(特集4-5図)。また、画像を解析して標高を求め、災害前の国土地理院の地形データとの比較により、崩壊した範囲、元の斜面の表面を流送した範囲及び堆積した深さを求めた(特集4-6図)。これらを現場での安全管理を行うための基礎資料として活用した。
今後、より迅速にかつ夜間にも標高データを取得できるシステムの開発及び画像や地図情報を現地で収集分析できる資機材の開発を行う計画である。
特集4-4図 救助活動現場の周辺の空撮画像
画像をクリック(タップ)すると拡大表示します

特集4-5図 警戒範囲や着眼点を追記したドローンによる河床の画像
画像をクリック(タップ)すると拡大表示します
特集4-6図 ドローンの画像を解析して得られた標高と災害前の標高の比較図
画像をクリック(タップ)すると拡大表示します
(4)G空間情報とICTを活用した大規模防火対象物における防火安全対策の研究開発(競争的資金)
本研究開発は、消防庁の競争的資金により、令和元年度から2か年計画でさいたま市消防局、千葉市消防局の協力のもと進められている委託研究である。
目的及び概要
本研究開発は、大規模な防火対象物の火災時等においてG空間情報やICTを活用し、防火対象物内の在館者(自衛消防隊員を含む。)や公設消防隊員の位置情報を防災センター(施設内の火災等の監視と消防用設備等の制御を行う管理施設)等で把握するG空間自衛消防支援システムと、自衛消防隊の活動状況や火災拡大状況等をスマートマスク(ICT等を活用して多機能化した空気呼吸器用のマスク)やタブレットにより、現場の公設消防隊員と情報共有し、効率的かつ安全に消防活動を行う現場活動支援システムの2つで構成されるG空間情報消防活動支援システムの開発を目的としている。
以下、研究の概要及び各システムの概要図を示す。
(ア)「G空間自衛消防支援システム」の構築
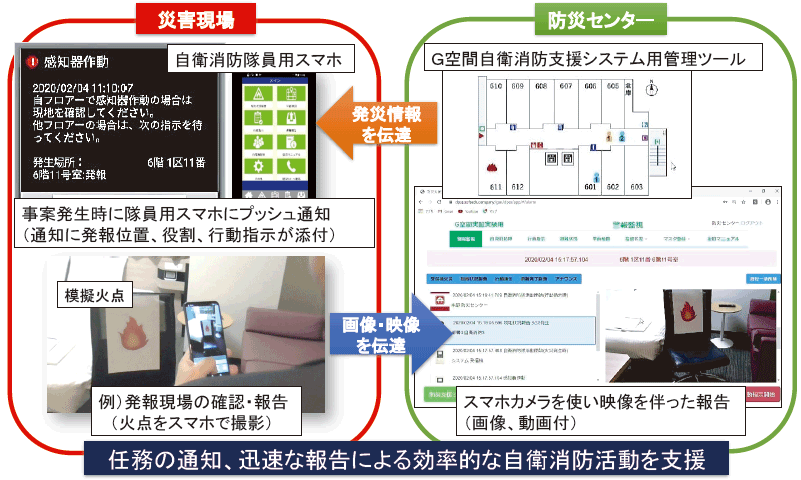
スマートフォンやタブレットを活用することで、事業所の自衛消防隊と防災センター間の情報を画像やテキスト等で共有し、自衛消防活動を支援する機能と、在館者(自衛消防隊員を含む。)の所在位置を特定する屋内測位機能を連携させた、「G空間自衛消防支援システム」を構築する。これにより、防災センターに集約される災害情報等を組み合わせることで、災害発生場所から近い位置にいる自衛消防隊員及び逃げ遅れ者の所在の検知、的確な初動対応の指示などができるようになり、自衛消防隊の活動をより効果的なものとすることができる(特集4-7図)。
特集4-7図 G空間自衛消防支援システム概要図
画像をクリック(タップ)すると拡大表示します
(イ)「現場活動支援システム」の開発
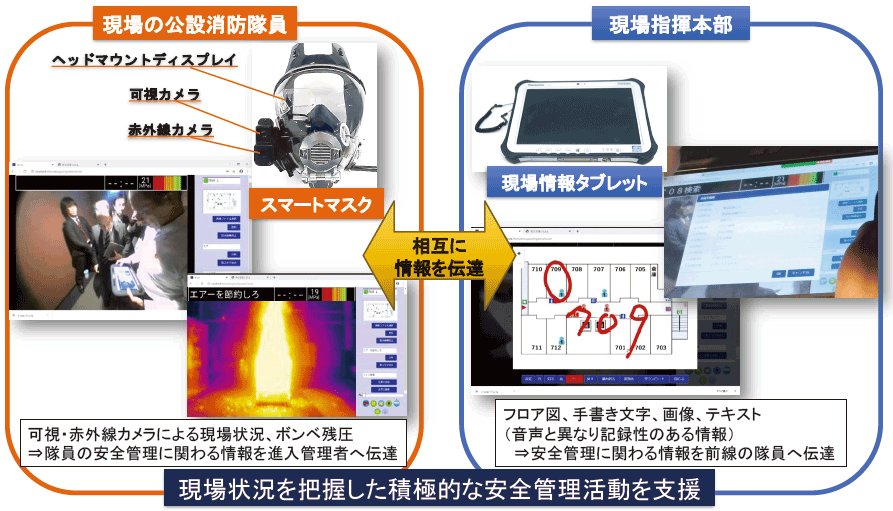
公設消防隊員が装備する空気呼吸器用のマスクに可視カメラや赤外線カメラ、ヘッドマウントディスプレイ等を付加することでスマートマスクとして多機能化を図り、さらに通信機能を付加することで現場の公設消防隊員と離れた場所で活動する指揮者(隊長)間での情報共有を行う「現場活動支援システム」を開発する。これにより、現場の公設消防隊員から指揮者へ現場状況などを伝達するとともに、指揮者から隊員へテキスト情報などを伝達することで、指揮活動の効率化や安全管理の向上を図ることができる(特集4-8図)。
特集4-8図 現場活動支援システム概要図
画像をクリック(タップ)すると拡大表示します
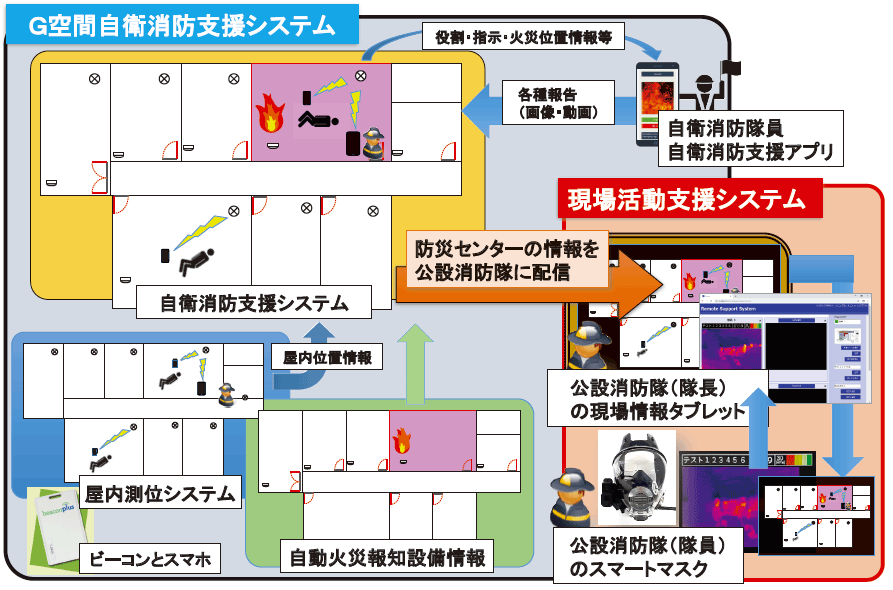
また、「G空間自衛消防支援システム」と「現場活動支援システム」間で連携を図り、自衛消防隊の活動状況や火災拡大状況等をスマートマスク等で共有することで、自衛消防隊及び公設消防隊の活動を支援する「G空間情報消防活動支援システム」の構築を目指している(特集4-9図)。
特集4-9図 G空間情報消防活動支援システム概要図
画像をクリック(タップ)すると拡大表示します
*1 半自律的:自律は自らが判断して行動すること。一部を消防隊員が判断し、指示することを半自律としている。
*2 テールローター:ヘリコプターの方向を制御するための後方にある小型のプロペラ
*3 クローラー:建設機械等に用いられているベルトを使った移動機構