2.研究開発の状況
以下では、現在消防庁において取り組んでいるAIやロボット等を利用したシステム等に関する研究開発の事例について紹介する。
(1)自動走行や連携技術を活用した消防ロボットシステムの研究開発(消防研究センター)
ア 目的及び概要
今後発生が懸念されている南海トラフ地震・首都直下地震の被害想定地域には、我が国有数のエネルギー・産業基盤が集積し、石油コンビナートにおける大規模・特殊な災害時には、消防隊が現場に近づけない等の大きな課題がある。そこで、耐熱性が高く、災害状況の画像伝送や放水等の消防活動を行う、AI技術を活用した消防ロボットシステムの研究開発を平成26年度から進めている。
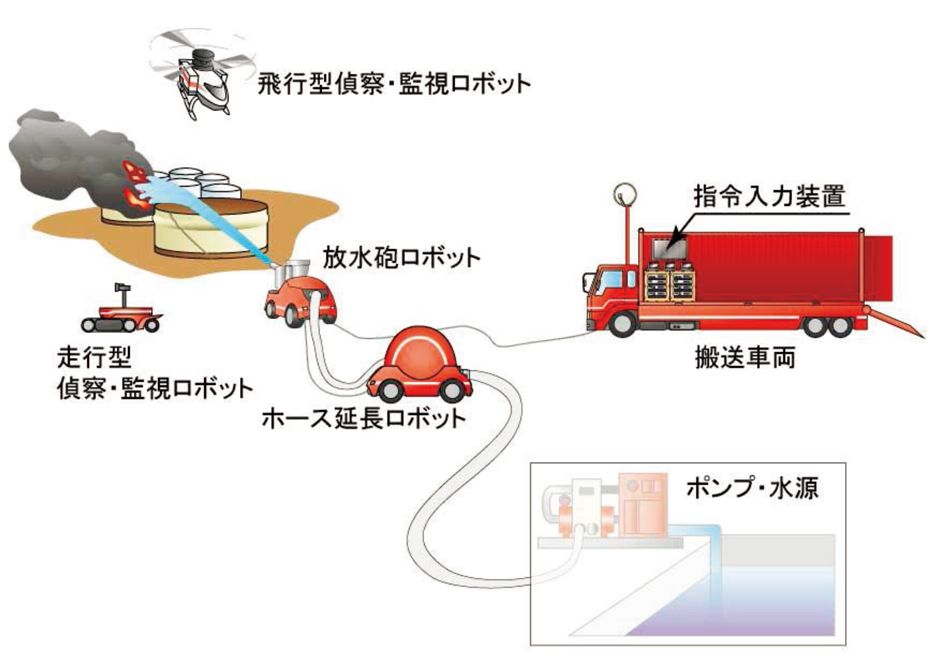
この消防ロボットシステムは、消防隊員による操作の必要がなく、システムが複数提案する移動経路や放水する位置の判断及び指示を入力するだけで、半自律的*2に爆発抑制や火災の延焼防止のための冷却活動や消火活動を行うことができる。消防ロボットシステムのイメージを特集8-1図に示す。具体的には、空中や地上の偵察・監視ロボットの情報を基に、放水ロボットの最適な放水位置を導出し、放水ロボット及びホース延長ロボットがそれぞれの作業を行う。消防ロボットシステムによる消防活動を効率的に実施するために、以下のような高度な技術を活用している。
特集8-1図 研究開発する消防ロボットシステムのイメージ
画像をクリック(タップ)すると拡大表示します
(ア)大規模火災に対する有効な消防活動を実施するために、AI技術を活用し、複数のロボットに機能を分散させ、情報を共有し、協調・連携して活動させる技術
(イ)消防隊員からより離れた場所で半自律的に活動するために、AI技術を活用し、過酷な状況においても画像認識や空間認識などを機能させる先端技術
(ウ)大規模火災に近接した高熱な領域において消防活動を行うための耐熱技術
大規模災害に対応するために複数のロボットが協調・連携して活動するが、一方でシステムの一部のロボット、たとえば偵察ロボットだけでも機能することも考慮し、研究開発を進めている。
本研究開発では、各単体のロボットの試作機を完成させ、試作したロボットに協調連携や自律化といった高度な機能を取り込み、平成30年度には実戦配備可能な消防ロボットシステムを完成させる計画としている。
イ 平成28年度に試作した各単体ロボット
飛行型偵察・監視ロボットは、プロペラが上下に2つ重なり、逆向き方向に回転する「二重反転機構」を採用している。この機構により、テールローター*3が必要なく小型化が可能になり、また、プロペラが吹き下ろす気流は、ロボット本体の冷却にも効果的に利用できる。走行型偵察・監視ロボットは飛散物が散乱した状況での走行も想定し、車輪、クローラー(履帯(りたい))*4の2つの走行機構を備えている。クローラーは、悪路や障害物に対する走破性能は高いが、移動速度が遅く、自律走行精度が低い。そこで、障害物等が検出されない範囲では、車輪で走行する。放水砲ロボット及びホース延長ロボットはサスペンション機構を備えた4輪駆動であり、農業用機械を応用し、地盤の液状化が発生した場所等においても走行が可能である。
放水砲ロボットに装備されているノズルは、新たに開発したもので、広角噴霧放水、ストレート放水、泡放射をノズルの形状切り替えだけで実現している。泡放射は、放水軌跡の安定性並びに泡による消火性能を両立できる方式を採用している。消防隊が所有する最大級のポンプで送水可能な放水量4,000L/min、放水圧1.0MPaに対応したノズルである。
完成させた各単体ロボットの試作機の実演公開を、平成29年4月に静岡市消防局の協力のもと、消防研究センターで実施した。


ウ 試作機の試験評価と実戦配備型の開発
平成28年度に試作した各単体ロボットの試作機を、静岡市消防局及び四日市市消防本部にそれぞれ約2か月間貸与し、試験評価を行った。その際、消防本部管内の石油コンビナートにおいても消防ロボットシステムを稼働させ、その性能を評価した。試験評価においては、自律走行できない地形があること、指示入力装置や手動操作装置の改善事項等の指摘を受けた。これらの評価を基に、試作機の改良設計や自律走行の高度化等を行い、現在、実戦配備型の消防ロボットシステムの開発を進め、平成30年度末に完成させる予定である。なお、本研究開発の実施にあたり、有識者及び消防本部の担当者で構成される外部評価会を設置し、評価会における意見も反映させつつ、研究開発を的確かつ効率的に推進している。

*2 自律は自らが判断して行動すること。一部を消防隊員が判断し、指示することを半自律としている。
*3 ヘリコプターの方向を制御するための後方にある小型のプロペラ
*4 建設機械等に用いられているベルトを使った移動機構
(2)有線ドローンを利用した移動型火のみやぐらとG空間システム連携の研究(競争的資金)
本研究は、消防庁の競争的資金制度により平成29年度から30年度までの間、前橋市消防局の協力のもと進められている委託研究である。
ア 目的及び概要
火災現場において、上空から俯瞰した映像や消防隊員が見ている活動現場の状況を災害対策本部とリアルタイムで共有できれば、消火活動や避難活動に極めて有効である。また、有線ドローンは、有線により十分な電力が継続的に供給されているため、強風に対し安定して飛行できる性能を確保するとともに、長時間連続して飛行することが可能となる。そこで、有線ドローンを打ち上げ、その位置情報と映像情報等を災害対策本部に伝送できるシステムを構築し、消防本部等において効率的に当該システムを運用するための研究開発が進められている。
研究の概要について列挙するともに、システム概要図を以下に示す(特集8-2図)。
特集8-2図 有線ドローンを利用した移動型火のみやぐらとG空間システムの概要図
画像をクリック(タップ)すると拡大表示します
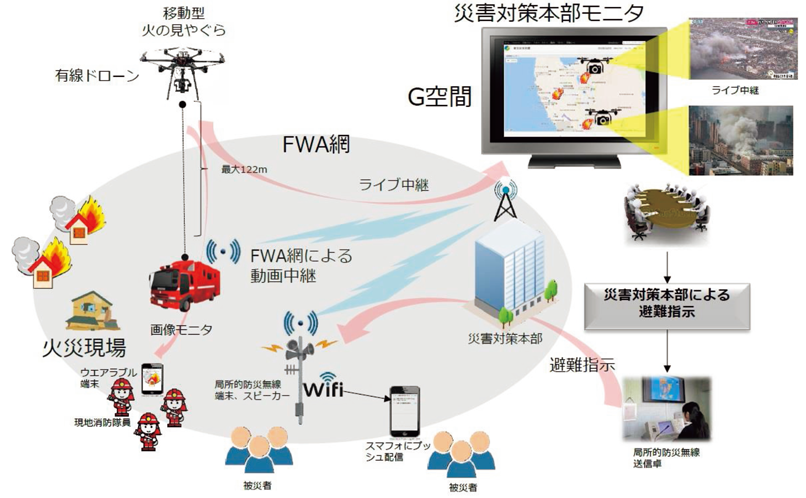
(ア)活動現場において有線ドローンを上空へ打ち上げ、空撮映像を災害対策本部に伝送する。有線ドローンは、1週間以上連続して飛行することができる仕様のものを用いている。
(イ)現場で活動する消防隊員に取り付けられたウェアラブルカメラの映像と位置情報をG空間情報*5として災害対策本部に伝送する。
(ウ)災害対策本部では、災害対策本部モニタ上の地図情報システムに示されたドローンや消防隊員のアイコンをクリックすることで、当該ドローンや消防隊員からの撮影映像をリアルタイムで確認する。
(エ)災害対策本部は、伝送された映像や災害の発生状況を踏まえ、活動戦術を策定して消防隊員に指示するとともに、災害現場の近傍にいる市民に対し、適切な方向へ逃げるよう避難の呼び掛けを行う。
イ 平成29年度の研究内容
活動現場で打ち上げた有線ドローンからリアルタイムで空撮映像が伝送できること、また災害対策本部から有線ドローンを遠隔操作することができることを、複数の打ち上げ場所で確認した。
ウ 今後の研究方針
地図情報システムの開発を完了させるとともに、当該システムを活用し、災害対策本部における図上訓練を実施し、システム全体の有効性の検証等を実施する予定である。
*5 位置情報とそれに関連づけられた情報(映像情報など)からなる情報
(3)消防防災活動におけるドローンの活用(消防研究センター)
ア 目的および概要
土砂崩れ等の大規模災害にあっては、被災地の上空から俯瞰した映像があれば、救助活動や活動上の安全確保に極めて有効である。そのためには、主に消防防災ヘリコプター等を用いることとなるが、大規模災害時にあって、航空機の活用については、他の消防活動との調整に時間を要するなどの課題があり、簡易に被災地上空の撮影ができない場合がある。一方で、最近注目されているドローンを用いることにより、より簡便に被災地上空での画像撮影ができるようになった。
近年、めざましく進歩しているドローンを消防の活動に役立てるには、何が必要で、どのように使えば有効なのか、消防研究センターでは、土砂災害を主な対象としてその活用方法を研究している。土砂災害の被害は近年毎年のように発生し、災害の影響が広範囲であり、また情報収集に時間を要する場合が多いことから、ドローンによる俯瞰的な情報の有用性が高いと考えられる。
イ 研究内容
ドローンによる画像を「見る」だけに留まらず、戦略、作戦、戦術を決定するのに役立てるためには、どのような情報を得て、それをどのように分析するのかを明らかにしておく必要がある。土砂災害を対象とした場合、俯瞰的な画像は、災害の種類と被害範囲の確認、何がどこへ流れたかを知ることによる要救助者の位置の推定、広範囲な災害における部隊の活動状況の把握等に活用することが考えられる。特集8-3図は、ある災害現場を対象として、災害前の衛星写真と、災害後のドローン画像を比較することにより、家屋が移動した様子を調べたものである。家屋が土砂と共に約70m移動したこと及び倒壊等の被害は生じていないことが分かる。
特集8-3図 崩壊の災害発生前後の状況を比較した例
画像をクリック(タップ)すると拡大表示します
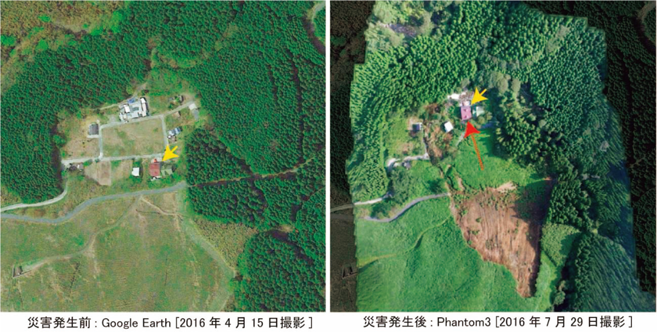
(備考)災害発生後の画像はドローンにより撮影した写真を用いて作成している。矢印で示した家屋が、災害後約70m移動している。
また、測量に用いる手法をドローンによる空撮画像に適用すれば、被災後の地表の高低を知ることができるため、堆積した土砂の深さ、救助活動中に隊員等が退去するための安全な場所、徒歩での移動や資機材の搬送が困難な場所等をあらかじめ確認することができる。
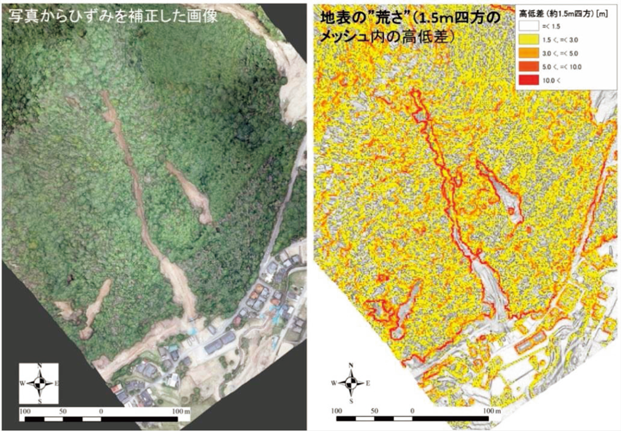
特集8-4図は、ある災害現場を対象として、ドローンの画像から求めた地表の「荒さ」を色分けして表示し、移動が難しい場所をあらかじめ知ろうとする試みの一例である。凹凸の激しい領域は移動が難しいと想像されるため、そうでない領域を選んで移動する方が良いが、泥が堆積した場所は凹凸が少なくても移動が困難であることから、高低情報だけではなく、画像やほかの指標も導入する必要があると考え、研究を進めている。
特集8-4図 ドローンから撮影した画像から数値標高モデルを作成し、その標高データを利用して地表の"荒さ"を評価し、移動の障害が少ないルートを探索しようとする研究成果の例
画像をクリック(タップ)すると拡大表示します
ウ 今後の研究方針
いくつかの消防本部では、すでにドローンの利活用が進んでいる*6。ドローンを用いてどのような画像を得るのか、また画像の見方、分析の仕方について、現場の活動と密接にリンクさせながら、消防本部と協力して検討を進めていきたい。
*6 全728本部中、116本部が無人航空機を保有し、72本部で活用実績がある(平成30年5月現在)。 消防庁では、無人航空機の円滑な運用の為に「消防防災分野における無人航空機の活用の手引き」を作成している。